.png?v=1663655544 "www.rchobby-jp.com")


CUAV Pixhack V5+ AutoPilot® is an advanced autopilot designed and made in CUAV. The board of the pixhack v5+ is based on the FMUv5 open hardware design, the external interface uses the Dronecode standard pinouts, and the modular design allows the user to design its backplane. It is fully compatible with PX4 and ArduPilot firmware. Mainly used for academic and business development.
特徴:
取り外し可能なコアデザイン
独立のダンピングシステムを内蔵
マルチセンサーシステム、複数冗長性
より高速なF765プロセッサ
RTK サポートされています。
Main Features:
Detachable Core Design
The Pixhack V5+ Autopilot still adopts a modular design, which is convenient for user integration.The core part of the flight control is integrated on the V5 core. The lower plate is detachable and serves only as an external interface carrier, giving consumers a customized space. Users can design their own lower plate according to their own needs.
New Open Source Hardware Design
Pixhack V5 AutoPilot is a new high-performance flight control system based on FMU V5 open source hardware. FMU v5 open source hardware features more advanced processors than FMU V3, larger flash and RAM, and more stable and reliable sensors.
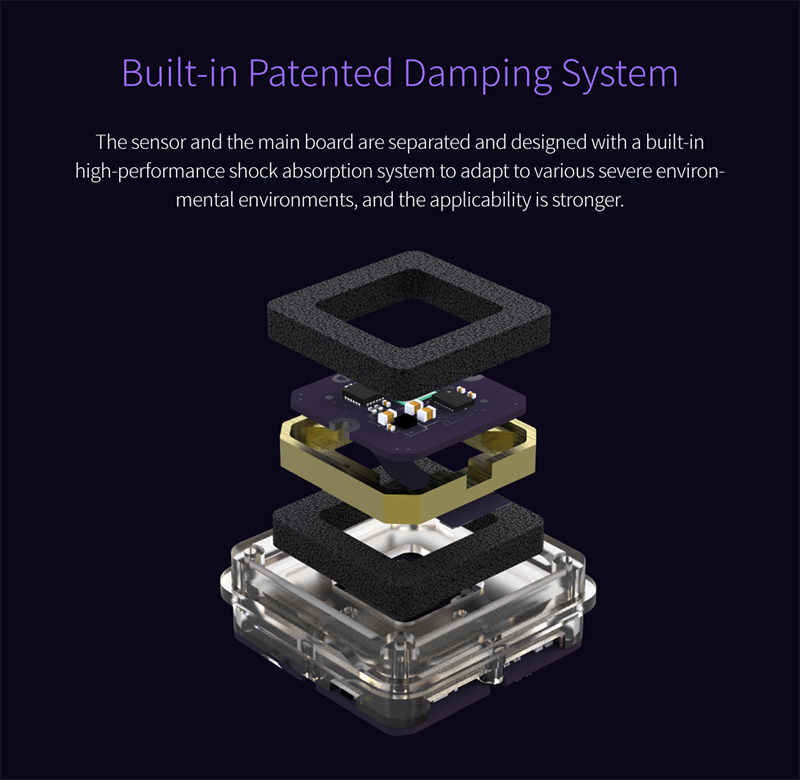
Built-in Patented Damping System
The sensor and the main board of the Pixhack V5+ flight controller are seperated and designed with a built-in high-performance shock absorption system to adapt to various severe enviroments, and the applicability is stronger.
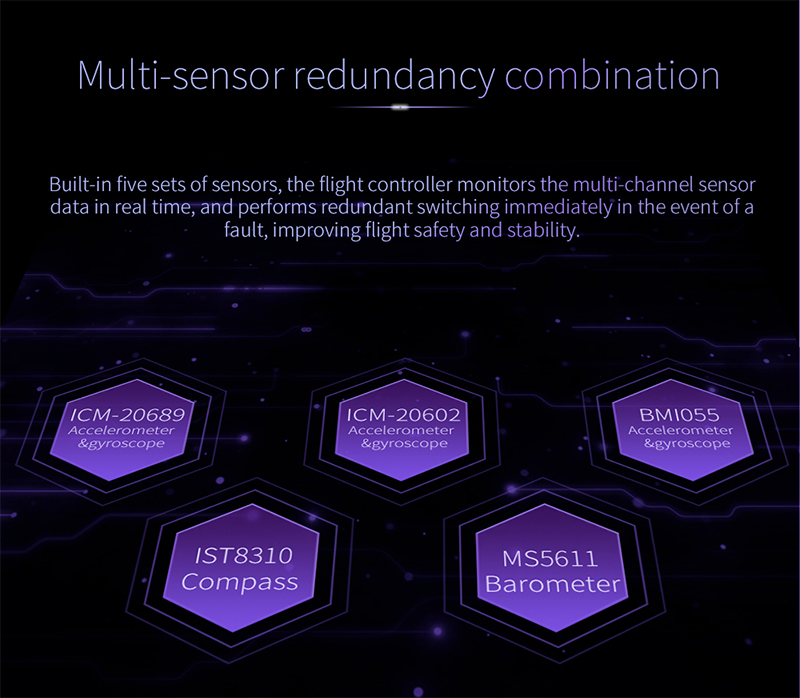
Multi-sensor Redundancy Combination
CUAV Pixhavk V5+ autopilot comes with built-in 5 sets of sensors, the flight controller monitors the multi-channel sensor data in real time, and performs redundant switching immediately in the event of a fault, improving flight safety and stability.
Faster Processor
In terms of hardware configuration, Pixhack V5+ autopilot flight controller abandoned the original STM32F427 processor of the px4 family and selected a more advanced STM32F765 processor with a clock speed of 216MHZ and 2MB FLASH/512K RAM, higher frequency and larger RAM.The clock speed is higher, the RAM is larger,the speed will be greatly improved.
仕様
プロセッサー
-STM32F765(32ビットARM Cortex M7,216 Mhz / 512 KB RAM / 2 MBフラッシュ、512KB RAM)
-STM32F100(32ビットARM Cortex-M3、24MHz、8KB SRAM)
センサー
-加速度計:ICM-20602 / ICM20689 / BMI055
-ジャイロスコープ:ICM-20602 / ICM20689 / BMI055
-気圧計:MS5611
-磁力計:IST8310
インターフェース:
-8-14 PWM出力(IOから6個、FMUから8個)
-3つの専用PWM /FMUのキャプチャ入力
-CPPM専用のR / C入力
-PPMおよびS.Bus専用のR / C入力
-アナログ/ PWMRSSI入力
-S.Busサーボ出力
-5つの汎用シリアルポート
-4つのI2Cポート
-4つのSPIバス
-シリアルESCを備えた2つのCANBuses
-2つのバッテリーの電圧/電流のアナログ入力
-動作電力:4.3〜5.4V
-USB入力:4.75〜5.25V
-サーボレール入力:0-36V
その他
-重量:91g
-寸法:42mm x 85.5mm x 33mm
-作動温度:-20〜80°C



CUAV NEW Ublox NEO M8N GPS Module integrates dual-mode GNSS, safety switch, RGB status light and Electronic Compass, it is specially designed for Pixhack V5/V5 Plus flight controllers.
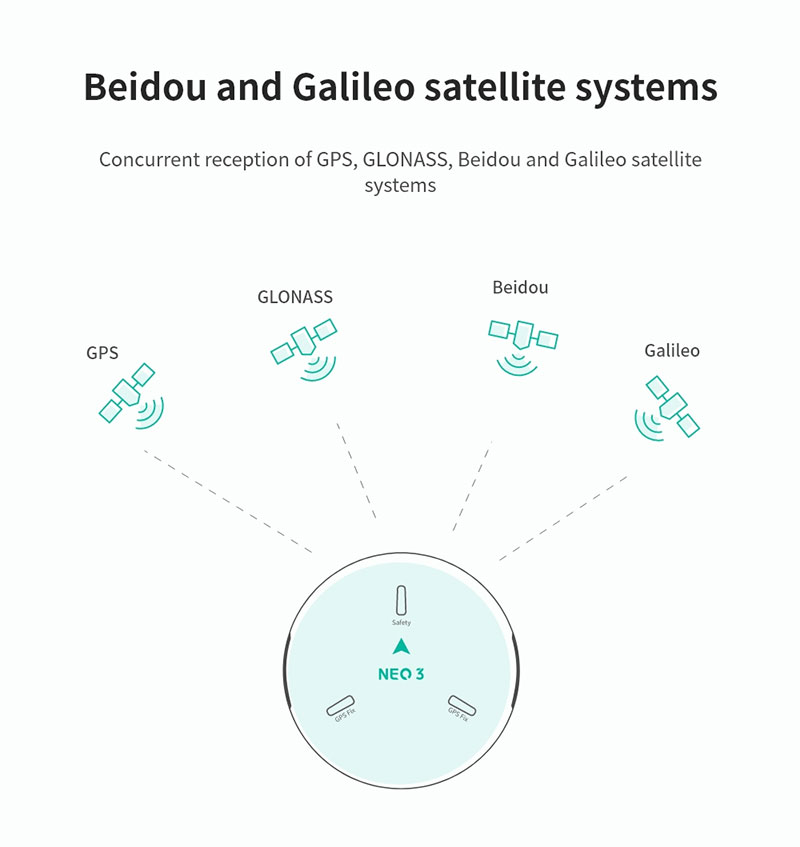
The built-in dual mode GNSS module provides high sensitivity and minimal acquisition time while maintaining low system power and simultaneous acquisition and tracking of different GNSS systems: Parallel receiv GPS (QZSS) and GLONASS OR BeiDou, or receiv both GLONASS and BeiDou. Built-in SAW and LNA with advanced RF architecture and interference suppression ensure optimal performance in a weak GPS signal enviroment.
仕様:
GPSの場所:U-BLOX M8N
RGBステータスライト:NCP5623C
コンパス:IST8310
ブザー:パッシブブザー
安全スイッチ:物理ボタン
精度:3D修正
更新レート:10Hz(最大)
取得:コールドスタート26S /ホットスタート1.5S /エイドスタート2S /再取得1S
受信機タイプ:72チャンネル(GPS / QZSS L1 C / A、GLONASS L10F、BeiDou B1I、Galileo E1B / C、SBAS L1 C / A:WAAS、EGNOS、MSAS、GAGAN)
感度:
追跡とナビゲーション-167dBm
コールドスタート:-148dBm
ホットスタート:-156dBm
再取得:-160dBm
機能:
高度なジャンプ
高速衛星検索速度
セキュリティと整合性の保護
同時に最大3つのGNSSを受信する
入力電圧:5V
作動温度:-10〜70°C