.png?v=1663655544 "www.rchobby-jp.com")






説明:
X7+ Pro オートパイロットは、最大 480MHz の処理速度を備えた STM32H743 プロセッサ、1M ストレージと 2M フラッシュ メモリ、
最新の Invensense + Bosch + TE シリーズ複合センサー 3 セットと工業用 RM3100 コンパスを内蔵し、安定性と耐干渉性が向上しています。
CUAV 特許の衝撃吸収設計と温度補償システム、X7 プロはカーゲージ ADIS16470 センサーも使用して、飛行の安定性をさらに向上させます。
特徴
航空グレードの ADI16470 センサー
衝撃吸収機能を内蔵
3 セットの Imus がインテリジェント フェイルオーバーをサポート
温度補償をサポート
CAN電流計をサポート
モジュラー設計、カスタムベースボードのサポート
GPS(オプション品):
| X7PRO | X7+PRO | |
| メインプロセッサ | STM32H743 | STM32H743 |
| メインプロセッサの周波数 | 480MHz | 480MHz |
| Flash | 2MB | 2MB |
| RAM | 1MB | 1MB |
| 加速度計とジャイロスコープ | ADIS16470 BMI088 ICM-20649 |
ADIS16470 ICM-42688-P ICM-20689 |
| 電子コンパス | RM3100 | RM3100 |
| バロメーター | MS5611 x2 | MS5611 * 2 |
| 長さ×幅×高さ | 77x 45.5x 39mm | 77x 45.5x 39mm |
| 重さ | 105g | 105g |
| ファームウェア | Ardupilot AC4.03(AP4.05)/PX4V1.11.1以降のバージョンのファームウェア | Ardupilot 4.10/PX4 V1.13 以降のファームウェア |
| 対応のモデル | 固定翼/3~8ローター/ヘリコプター/VTOL垂直離着陸ドローン/無人船舶 など | 固定翼/3~8ローター/ヘリコプター/VTOL垂直離着陸ドローン/無人船舶 など |
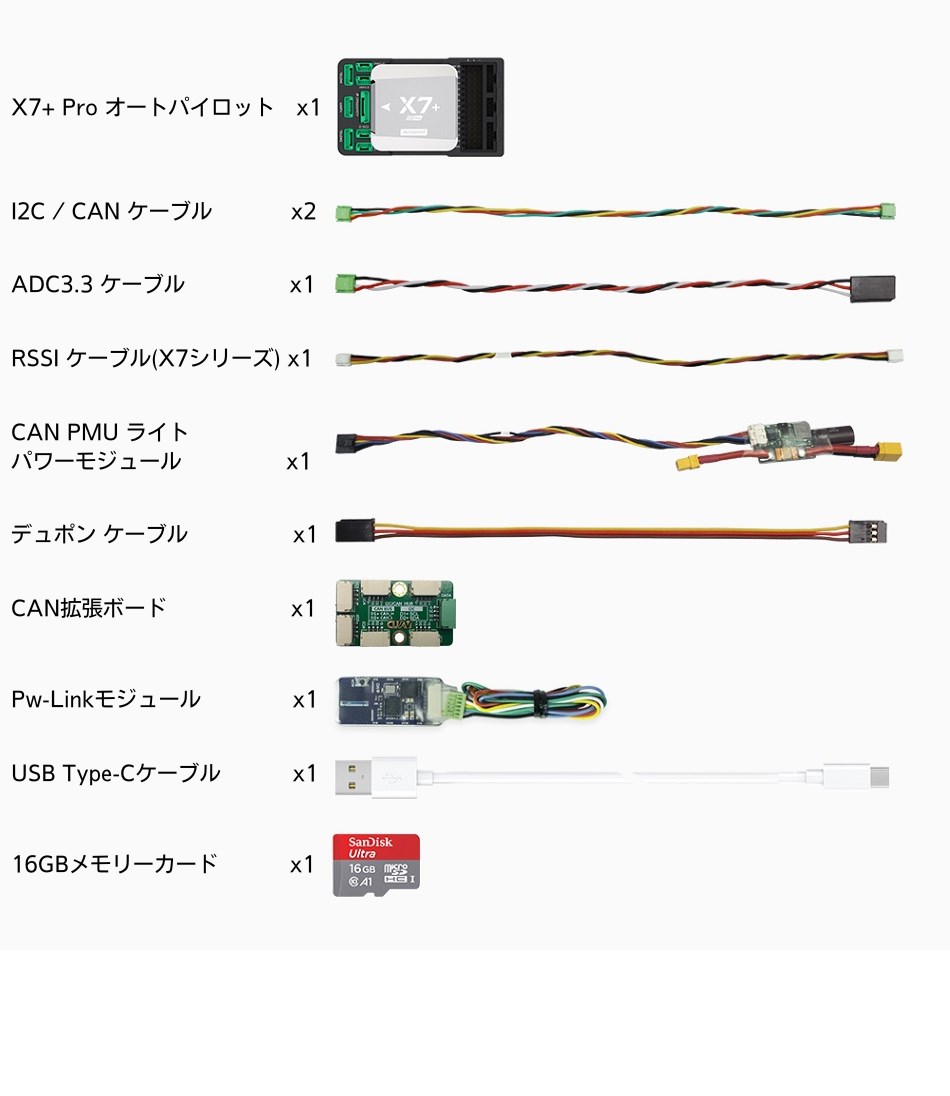
X7+Pro オートパイロット
STM32H743プロセッサ
航空宇宙グレードのADI16470加速度計 およびジャイロスコープ RM3100 工業用グレードのコンパス

H7プロセッサーの強力なパフォーマンス
X7+オートパイロットは、STM32H743シリーズ プロセッサCPU、Cortex-M7コア(倍精度浮動小数点ユニット付き)を使用します。動作周波数が480MHz、2MBフラッシュ、1MB RAMに増加します。フライトコントローラーんぽ高度なコンピューティングニーズに対応します。STM32F7製品ラインと比較して、動的消費電力効率が2倍になります。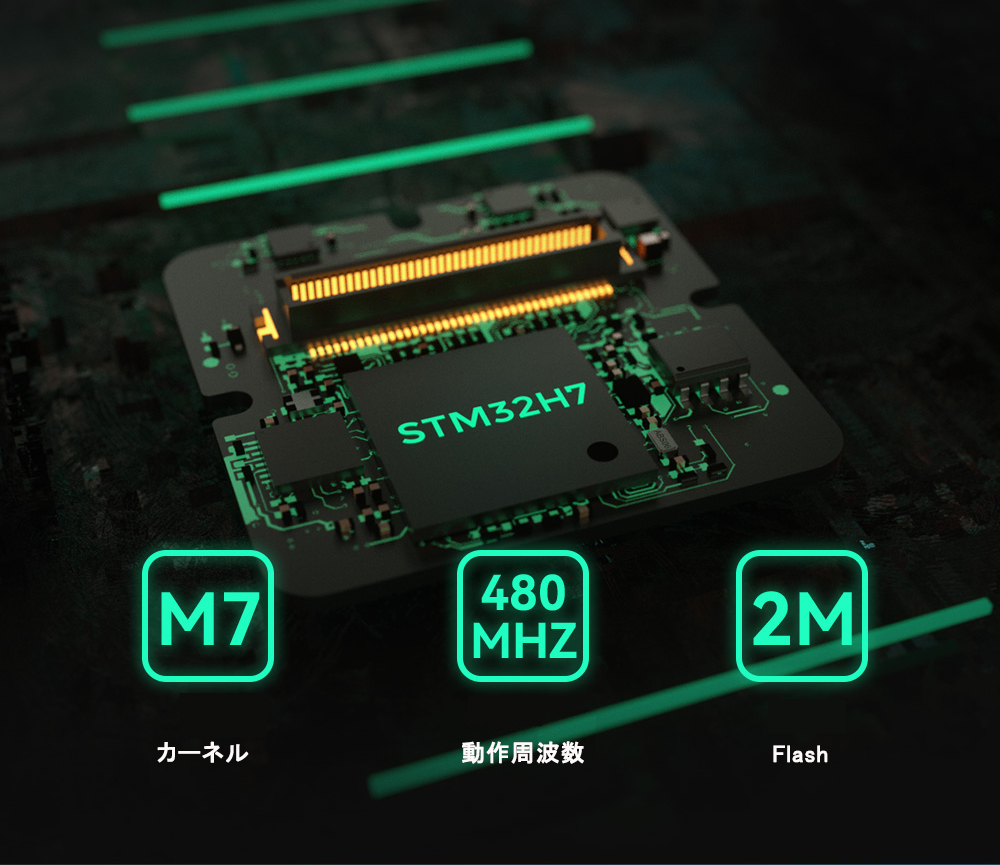
温度補償システム
内蔵の高精度センサー温度補償システムにより、センサーは一定の温度で動作し、センサーは高温および低温でも高精度、高感度で安定して動作します。
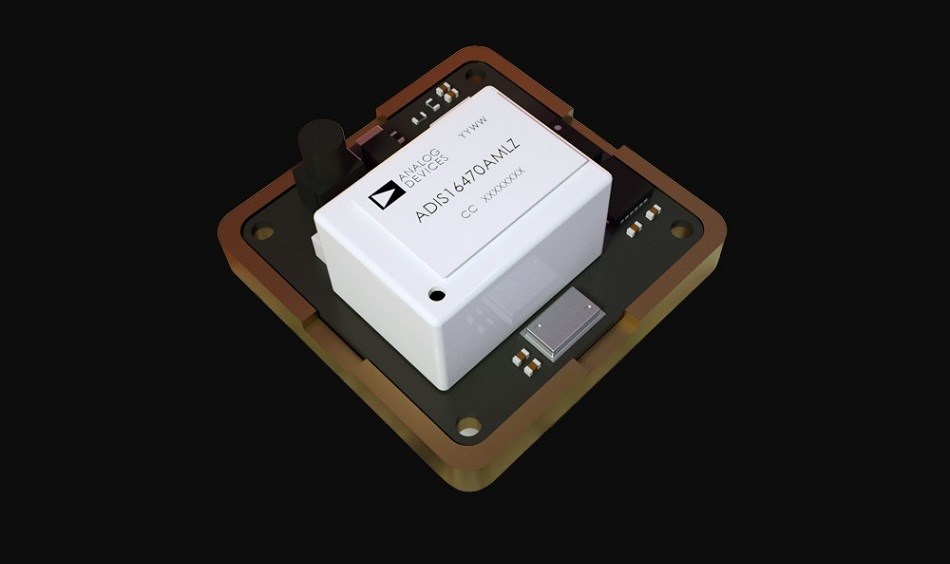
航空宇宙グレードのADIS16470センサー
X7+Proは、最先端の航空宇宙プロジェクトでよく使用されるハイエンドADI16470チップを使用しています。優れたジャイロセンサーと加速度ドリフト性能を備えています。今回はそれをオープンソースの飛行制御に持ち込みます。慎重に調整した後、飛行正誤のセンサー性能がより良い役割を果たします。
COREセパレート設計
X7+フライトコントローラーは、メインMCUとIMUをCOREモジュールに統合しており、別売りも可能です。ユーザーは個別のニーズを満たすためにUAV構造に従ってベースボードを設計するか、当社のCAN PL ベースボードを購入して使用します。X7+COREインターフェイスは、X7、X7ProおよびV5+フライトコントローラーCOREと互換性があります。
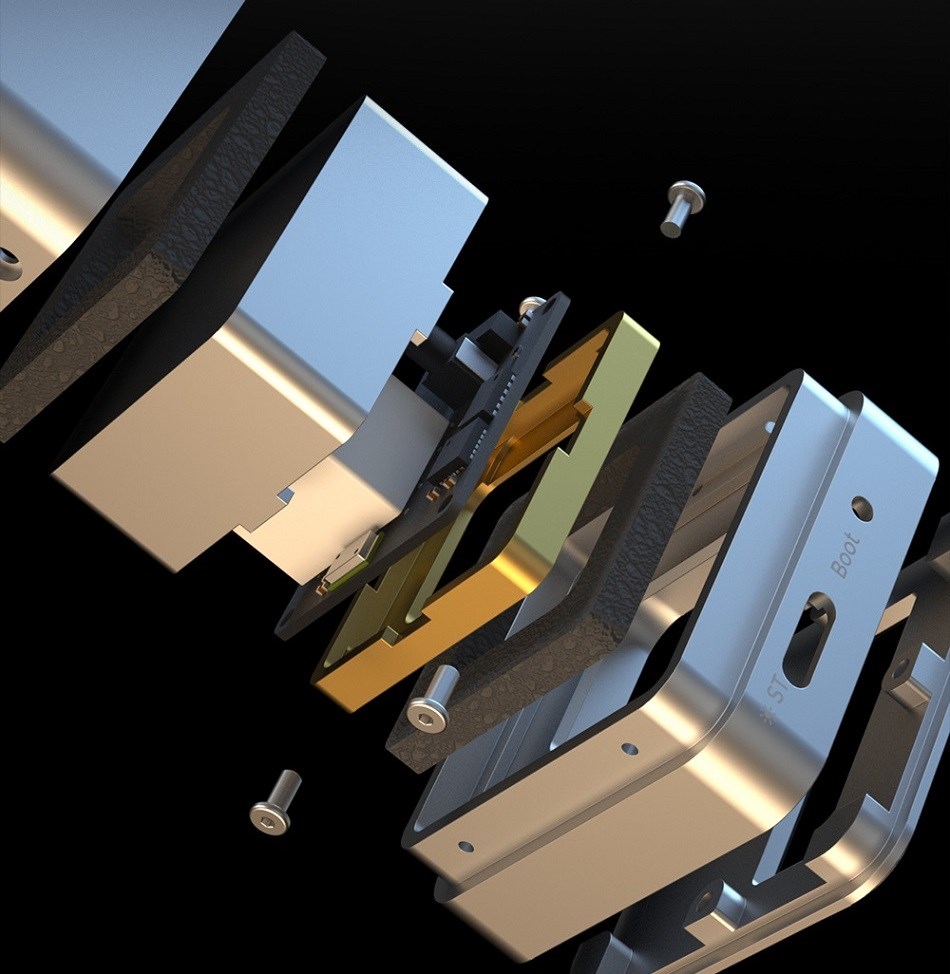
より優れたCUAV特許取得ずみの衝撃吸収システム
数十の反復を経て、数百の衝撃吸収材のテストと検証、コンピューターモデル分析、数千回の飛行テストが行われ、衝撃吸収性がさらなるレベルに向上しました。
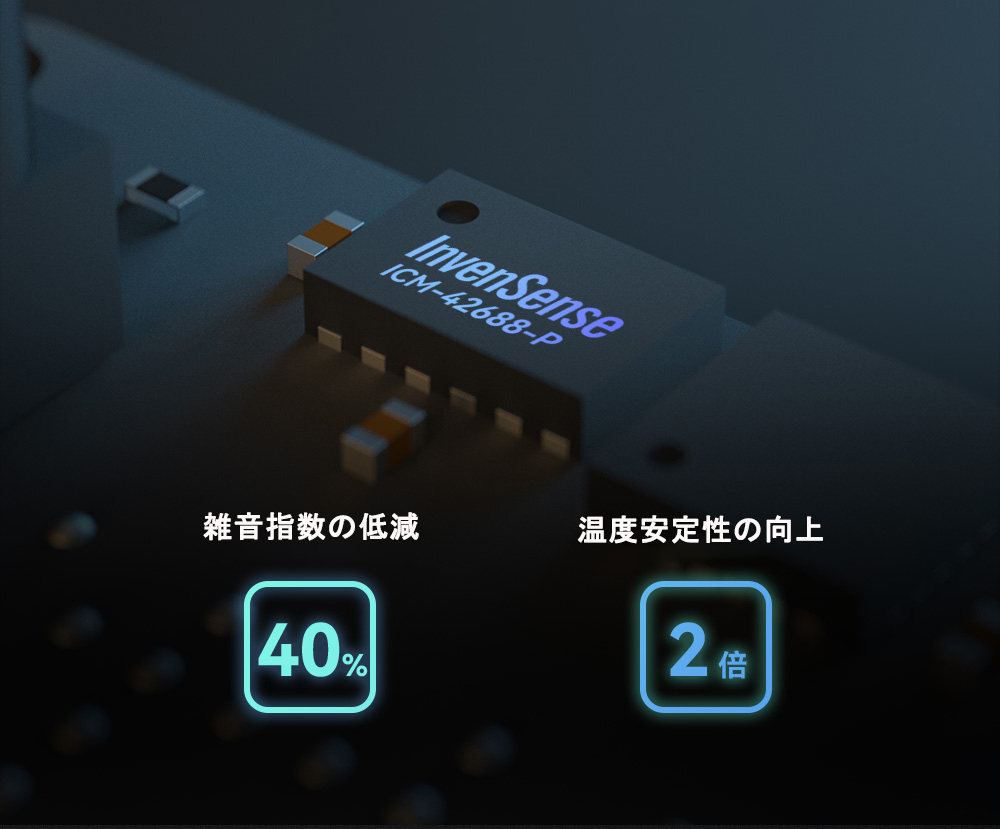
センサーが再びアップグレードされました。
センサーはフライトコントローラーを評価するための重要な指標の一つです。今回はICM-42688-Pセンサーを追加しました。従来の民生用IMUと比較して、ICM-42688-Pの雑音指数は40%軽減され、温度安定性は2倍向上し、温度変化の場合でも最高精度の測定を保証します。
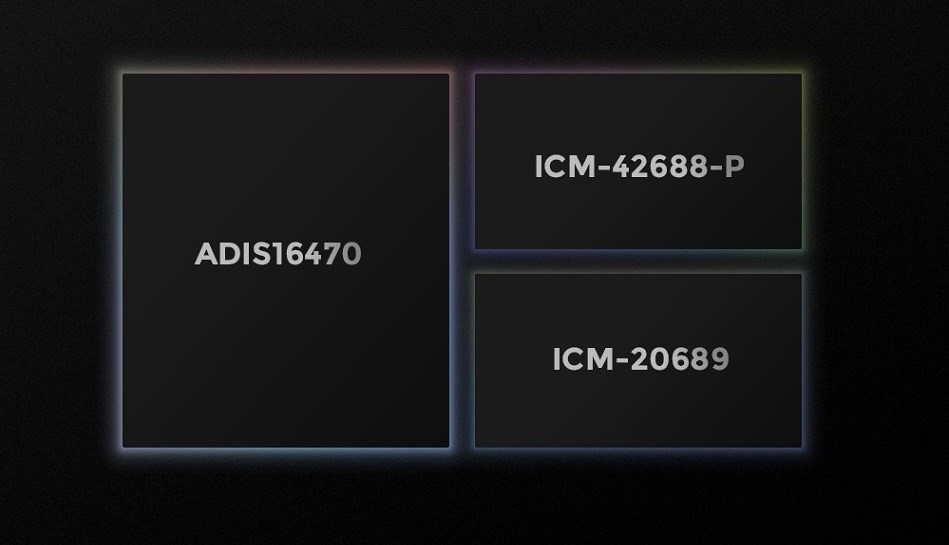
センサーの冗長設計
3セットの加速度計とジャイロスコープを内蔵したフライトコントローラーは、複数のセンサーのデータをリアルタイムで監視し、障害が発生した場合には直ちに冗長切替を実施して、飛行の安全性と安定性を向上させます。
標準パックデジタル電源モジュール
標準パッケージには、CUAVの独立したR&D ITT アルゴリズムを使用したUAVCAN プロトコル デジタル電力検出モジュール、UAVのリアルタイム電圧と電流の正確な測定が含まれており、飛行時間の推定の信頼性が向上します。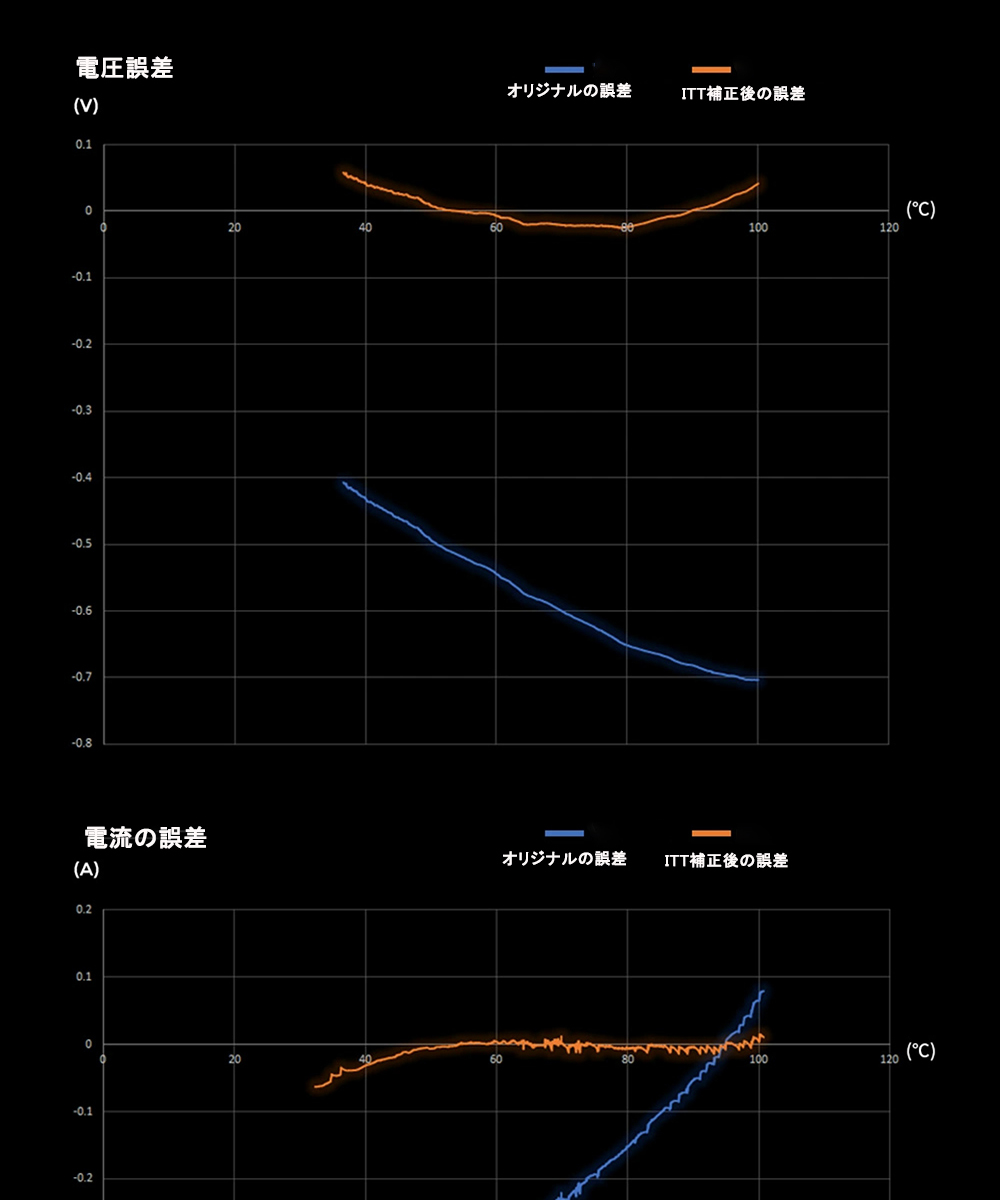
LTE Linkシリーズ 4Gテレメトリをサポート
LTE Linkシリーズ 4Gテレメトリをサポートしているため、Flightビデオとデータを距離制限なしで送信でき、ビデオ共有をサポートします。
オプションのRTK&PPKモジュールでより多くのアプリケーションを実現
CUAV の RTK および PPK 製品を購入すると、高精度の位置決めが必要なアプリケーション向けにセンチメートルレベルの位置決めを実現できます。農薬散布、測量、マッピングなどの分野に活用できます。

仕様
| プロセッサー | STM32H743 |
| 動作周波数 | 480MHz |
| フラッシュ | 2MB |
| RAM | 1MB |
| 加速度計&ジャイロ | ADIS16470、ICM-42688-P、ICM-20689 |
| コンパス | RM3100 |
| バロメーター | MS5611 x2 |
| UART | 5 |
| I2C | 6(2つのインターフェイスはGPS&SAFETY&UART4に統合されています) |
| CAN | 2 |
| ACC入力 | 1(6.6V/3.3Vをサポート) |
| SPI | 1 |
| PWN出力 | 14(M1-M12 DSHOTプロトコルをサポート) |
| RC入力 | 1 PPM SBUS DSMをサポート |
| RSSI | PWMまたは3.3Vアナログ電圧 |
| 電源入力 | 2(ADC プロトコル用の電源A、CANプロトコル用の電源C) |
| GPSポート | 2 |
| 安全スイッチ | GPS&SAFETYポートに統合 |
| ビープ音 | GPS&SAFETYポートに統合 |
| デバッグ | 1(UART7) |
| JATG | 1 |
| USB | Type-C x2 |
| TFスロット | 1 |
| 定格電圧 | 4.5~5.5V |
| USB電圧 | 4.75~5.25V |
| サーボ電圧 | 0~36V |
| 作業温度 | -20℃~85℃ |
| サイズ(L*W*H) | 77x45.5x39mm |
| 重量 | 105g |
| ファームウェアのサポート | Ardupilot 4.10 / px4 v1.12.3以降のバージョン |
| モデルサポート | 3~8マルチコプター、航空機、ヘリコプター、VTOL、無人車両、ローバー等 |